
ページ読込中...
ページ読込中...

[English]
| 橋本 周司 [教授] |  |
|
| homepage | https://www.phys.waseda.ac.jp/wps/shalab/index-j.html | |
| 専門分野 | 計測・情報工学研究 | |
| 研究テーマ・研究活動 | ||
| 1977 年 早稲田大学大学院博士課程修了 工学博士(早稲田大学) 1979 年 東邦大学理学部講師 1988 年 東邦大学理学部助教授 1991 年 早稲田大学理工学部助教授 1993 年 早稲田大学理工学部(現 理工学術院)教授 |
||
物理量を測ることから始まった計測工学は、測定対象をスカラー量からベクトル量へ広げて、形を測る、状況を測るという問題に取り組み、情報工学と結びついて、単なる計量ではなく記号化という認識の世界へ入りました。現在では人間の感性を測ることまでその射程に入れています。一方、我々の五感を通して情報を伝達する手段として、画像、音響、力など、物理的メディアが自由に使用できるようになってきており、計測や制御の対象や方法論も大きく変わりつつあります。
本研究室の拠点は、理工キャンパスの学科研究室を中心に、喜久井町キャンパスのヒューマノイド研究所および2008 年度に採択されたGCOE「グローバルロボットアカデミア」の研究施設内にもあります。また、欧州連合のFP7プログラムの一つに参加してイタリア、アメリカなどの海外の大学との共同研究も進めております。卒論生も含め以下の班に属して各自の課題に取り組んでいます。
 1) 音楽・マルチメディア班:音響信号処理の基礎的な理論から音楽情報処理とマルチメディアパフォーマンスシステムの構築までを研究しています。
1) 音楽・マルチメディア班:音響信号処理の基礎的な理論から音楽情報処理とマルチメディアパフォーマンスシステムの構築までを研究しています。
2) 画像情報班:画像処理の新しい方法を探求し、コンピュータグラフィックス、画像計測および画像認識の実問題の研究を行っています。
3) ロボッティック班:人間と機械の新しい関係の構築を目指して、ロボットやマンマシンインタフェースの研究に取り組んでいます。
4) ケミカルロボティック班:化学反応に基づいて、金属の身体とシリコンの脳を持つロボットとはまったく異なる生き物のようなロボットの実現を目指しています。
5) メタアルゴリズム班:遺伝的アルゴリズムやニューラルネットワークの理論と応用、自己組織化と自己複製などを研究対象としています。
留学生も多数おりますが、メンバーの多くは応用物理学科または物理学科の出身ですので、いわゆる電子・情報系とは異なった勉強をしてきております。それを活かして、宇宙から人間社会までを見通した「一味違った」工学の研究をしたいと考えております。皆さんも一緒にやりませんか?
| Shuji Hashimoto [Professor] | |
|
| homepage | https://www.phys.waseda.ac.jp/wps/shalab/index-j.html | |
| research field | Measurement and Information Engineering – Harmonized Human-Machine Environments – | |
| research keywords | ||
| Robotics Image and Sound Processing Meta-Algorithms |
||
| link | ||
he mission of this laboratory is to build a new relationship between humans and machines based on an understanding of human intellect, emotion, and volition. Therefore, our research is specifically concerned with cognition in the context of man-machine-environment interaction. Based on these considerations, we are studying many key technologies for future machines. We have four research groups that cover topics through materials to systems and from theoretical to experimental fields. They are the Image Processing, Music & Sound Processing, Meta-Algorithms, and Robotics groups. We are a member of the Humanoid Robotics Institute, Waseda University. We are also a core member of the Waseda University Global COE Program, “Global Robot Academia.”
Along with research on new practical technologies for human-machine interaction, I am currently planning an experiment to release a robot into nature and to see how much skill it would acquire by itself to survive. If robots could know their bodies and have the will of living forever, they would certainly develop intelligence on their own initiative. In order to do so, self-structuring and self-reproduction are important, even for simple living creatures. If computers and machines became more elaborate, materials to create better robots closer to human beings or higher animals would be available, but for the time being it is still impossible to create a robot similar to a fly or a mouse. However simple the living creature may be, designs and programs are extremely complex and designing in detail or assembling without mistakes is difficult. Therefore, it is necessary to first have what is possible made by human beings, and then research on a way to raise robots so that they develop by themselves.
Our long range challenge is to make a machine with a real heart. In my opinion, we must overcome three main difficulties before realizing this dream. The first is software complexity. As systems become more and more complex, detailed programming becomes almost impossible and testability goes down. We need a new way of production to integrate self-organizing software and hardware. The second difficulty is the limitation of hardware. Most existing robots consist of a metal body and silicon brain. We should search for different materials which are soft, flexible, and easy to organize. The last difficulty is not in technology but in philosophy and ethics. As far as we obey Asimov’s three laws of robotics, we cannot have a machine that is a real human partner, because a human-centered ideology contradicts the idea of a machine with a heart. We have to reconsider the relationship between humans and machines to establish a new philosophy.
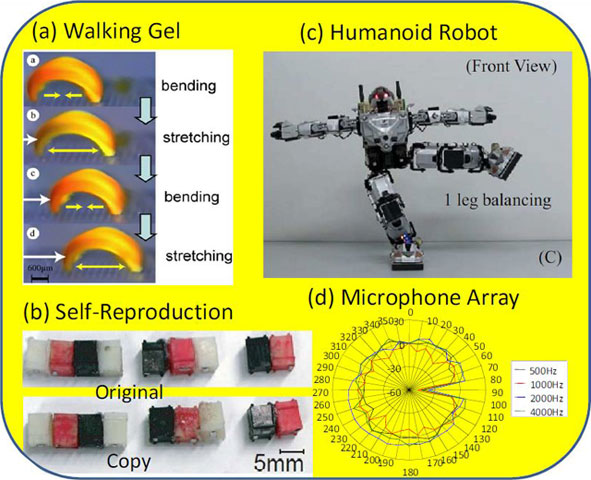
(a) Establishing “Chemical Robotics” to make a soft robot driven by chemical reaction chains. (b) The first trial of self-reproduction of millimeter-scale parts for growing robots. (c) A tactile sensing feet system for humanoid robots can keep balance with a single leg even when external force is applied. (d) Characteristics of a new noise separation algorithm in the time domain utilizing aggregated microphones.